|
CMSIS-RTOS
Version 1.03
Real-Time Operating System: API and RTX Reference Implementation.
|
|
CMSIS-RTOS
Version 1.03
Real-Time Operating System: API and RTX Reference Implementation.
|
Example projects using CMSIS-RTOS RTX are available for various development boards. To make use of these examples, you need to install a Device Family Pack in µVision and use Pack Installer to open a CMSIS-RTOS Blinky project. If you wish to start a CMSIS-RTOS RTX from scratch, follow these steps:
In the Manage Run-Time Environment window that opens, select CMSIS::CORE and CMSIS::RTOS (API)::Keil RTX. If the Validation Output requires other components to be present, try to use the Resolve button:

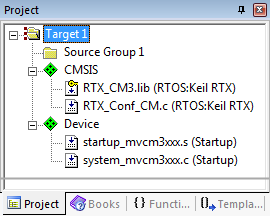
Click OK. In the Project window, you will see the files that have been automatically added to you project, such as RTX_Conf_CM.c and the system and startup files:
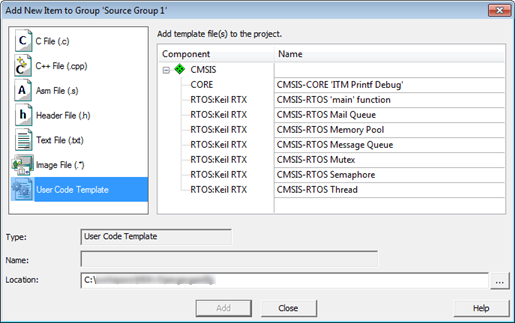
You can add template files to the project by right-clicking on Source Group 1 and selecting Add New Item to 'Source Group 1'. In the new window, click on User Code Template. On the right-hand side you will see all available template files for CMSIS-RTOS RTX:
With #define osObjectsExternal objects are defined as external symbols. This allows to create a consistent header file that is used throughout a project. If you are using the CMSIS-RTOS 'main' function user code template, such a header file (called osObjects.h) will be added automatically to the project:
Code Example
This header file defines all objects when included in a C/C++ source file. When #define osObjectsExternal is present before the header file, the objects are defined as external symbols. A single consistent header file can therefore be used throughout the whole project.
Code Example
The CMSIS-RTOS RTX kernel uses the following interrupts:
Interrupts can be used without limitation. Interrupt priority grouping can be used with some restrictions:

