|
CMSIS-Driver
Version 2.05
Peripheral Interface for Middleware and Application Code
|
|
CMSIS-Driver
Version 2.05
Peripheral Interface for Middleware and Application Code
|
Driver API for Memory Card Interface using SD/MMC interface (Driver_MCI.h) More...
Content | |
| MCI Events | |
| The MCI driver generates call back events that are notified via the function ARM_MCI_SignalEvent. | |
| MCI Control Codes | |
| Configure and control the MCI using the ARM_MCI_Control. | |
| MCI Send Command Flags | |
| Specify various options for sending commands to the card and the expected response. | |
| MCI Transfer Controls | |
| Specify data transfer mode. | |
| MCI Card Power Controls | |
| Specify Memory Card Power supply voltage. | |
Data Structures | |
| struct | ARM_DRIVER_MCI |
| Access structure of the MCI Driver. More... | |
| struct | ARM_MCI_CAPABILITIES |
| MCI Driver Capabilities. More... | |
| struct | ARM_MCI_STATUS |
| MCI Status. More... | |
Typedefs | |
| typedef void(* | ARM_MCI_SignalEvent_t )(uint32_t event) |
| Pointer to ARM_MCI_SignalEvent : Signal MCI Card Event. More... | |
Functions | |
| ARM_DRIVER_VERSION | ARM_MCI_GetVersion (void) |
| Get driver version. More... | |
| ARM_MCI_CAPABILITIES | ARM_MCI_GetCapabilities (void) |
| Get driver capabilities. More... | |
| int32_t | ARM_MCI_Initialize (ARM_MCI_SignalEvent_t cb_event) |
| Initialize the Memory Card Interface. More... | |
| int32_t | ARM_MCI_Uninitialize (void) |
| De-initialize Memory Card Interface. More... | |
| int32_t | ARM_MCI_PowerControl (ARM_POWER_STATE state) |
| Control Memory Card Interface Power. More... | |
| int32_t | ARM_MCI_CardPower (uint32_t voltage) |
| Set Memory Card Power supply voltage. More... | |
| int32_t | ARM_MCI_ReadCD (void) |
| Read Card Detect (CD) state. More... | |
| int32_t | ARM_MCI_ReadWP (void) |
| Read Write Protect (WP) state. More... | |
| int32_t | ARM_MCI_SendCommand (uint32_t cmd, uint32_t arg, uint32_t flags, uint32_t *response) |
| Send Command to card and get the response. More... | |
| int32_t | ARM_MCI_SetupTransfer (uint8_t *data, uint32_t block_count, uint32_t block_size, uint32_t mode) |
| Setup read or write transfer operation. More... | |
| int32_t | ARM_MCI_AbortTransfer (void) |
| Abort current read/write data transfer. More... | |
| int32_t | ARM_MCI_Control (uint32_t control, uint32_t arg) |
| Control MCI Interface. More... | |
| ARM_MCI_STATUS | ARM_MCI_GetStatus (void) |
| Get MCI status. More... | |
| void | ARM_MCI_SignalEvent (uint32_t event) |
| Callback function that signals a MCI Card Event. More... | |
Driver API for Memory Card Interface using SD/MMC interface (Driver_MCI.h)
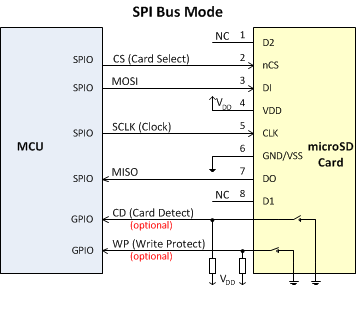
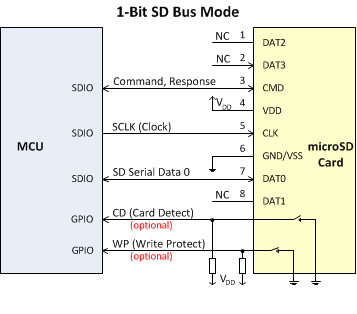
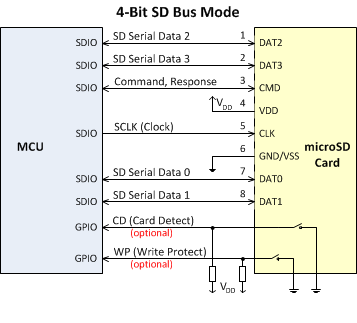
The Memory Card Interface (MCI) implements the hardware abstraction layer for Secure Digital (SD) and Multi Media Card (MMC) memory that is typically used as file storage. For embedded systems, SD/MMC devices are available as memory cards in several forms (SD, miniSD, microSD, MMC, MMCmicro) or as non-removable devic es that are directly soldered to the PCB (eMMC).
References:
The MultiMediaCard Association (merged with JEDEC) provides detailed documentation under www.jedec.org.
Block Diagram**
The MCI driver allows you to exchange data of the SD/MMC memory via SD/MMC interface.
The following modes are supported by SD/MMC memory cards:
MCI API**
The following header files define the Application Programming Interface (API) for the MCI interface:
The driver implementation is a typical part of the Device Family Pack (DFP) that supports the peripherals of the microcontroller family.
Driver Functions**
The driver functions are published in the access struct as explained in Common Driver Functions
| struct ARM_DRIVER_MCI |
Access structure of the MCI Driver.
The functions of the MCI are accessed by function pointers exposed by this structure. Refer to Common Driver Functions for overview information.
Each instance of an MCI provides such an access structure. The instance is identified by a postfix number in the symbol name of the access structure, for example:
A configuration setting in the middleware allows connecting the middleware to a specific driver instance Driver_MCIn. The default is 0, which connects a middleware to the first instance of a driver.
Data Fields | |
| ARM_DRIVER_VERSION(* | GetVersion )(void) |
| Pointer to ARM_MCI_GetVersion : Get driver version. More... | |
| ARM_MCI_CAPABILITIES(* | GetCapabilities )(void) |
| Pointer to ARM_MCI_GetCapabilities : Get driver capabilities. More... | |
| int32_t(* | Initialize )(ARM_MCI_SignalEvent_t cb_event) |
| Pointer to ARM_MCI_Initialize : Initialize MCI Interface. More... | |
| int32_t(* | Uninitialize )(void) |
| Pointer to ARM_MCI_Uninitialize : De-initialize MCI Interface. More... | |
| int32_t(* | PowerControl )(ARM_POWER_STATE state) |
| Pointer to ARM_MCI_PowerControl : Control MCI Interface Power. More... | |
| int32_t(* | CardPower )(uint32_t voltage) |
| Pointer to ARM_MCI_CardPower : Set card power supply voltage. More... | |
| int32_t(* | ReadCD )(void) |
| Pointer to ARM_MCI_ReadCD : Read Card Detect (CD) state. More... | |
| int32_t(* | ReadWP )(void) |
| Pointer to ARM_MCI_ReadWP : Read Write Protect (WP) state. More... | |
| int32_t(* | SendCommand )(uint32_t cmd, uint32_t arg, uint32_t flags, uint32_t *response) |
| Pointer to ARM_MCI_SendCommand : Send Command to card and get the response. More... | |
| int32_t(* | SetupTransfer )(uint8_t *data, uint32_t block_count, uint32_t block_size, uint32_t mode) |
| Pointer to ARM_MCI_SetupTransfer : Setup data transfer operation. More... | |
| int32_t(* | AbortTransfer )(void) |
| Pointer to ARM_MCI_AbortTransfer : Abort current data transfer. More... | |
| int32_t(* | Control )(uint32_t control, uint32_t arg) |
| Pointer to ARM_MCI_Control : Control MCI Interface. More... | |
| ARM_MCI_STATUS(* | GetStatus )(void) |
| Pointer to ARM_MCI_GetStatus : Get MCI status. More... | |
| ARM_DRIVER_VERSION(* GetVersion)(void) |
Pointer to ARM_MCI_GetVersion : Get driver version.
| ARM_MCI_CAPABILITIES(* GetCapabilities)(void) |
Pointer to ARM_MCI_GetCapabilities : Get driver capabilities.
| int32_t(* Initialize)(ARM_MCI_SignalEvent_t cb_event) |
Pointer to ARM_MCI_Initialize : Initialize MCI Interface.
| int32_t(* Uninitialize)(void) |
Pointer to ARM_MCI_Uninitialize : De-initialize MCI Interface.
| int32_t(* PowerControl)(ARM_POWER_STATE state) |
Pointer to ARM_MCI_PowerControl : Control MCI Interface Power.
| int32_t(* CardPower)(uint32_t voltage) |
Pointer to ARM_MCI_CardPower : Set card power supply voltage.
| int32_t(* ReadCD)(void) |
Pointer to ARM_MCI_ReadCD : Read Card Detect (CD) state.
| int32_t(* ReadWP)(void) |
Pointer to ARM_MCI_ReadWP : Read Write Protect (WP) state.
| int32_t(* SendCommand)(uint32_t cmd, uint32_t arg, uint32_t flags, uint32_t *response) |
Pointer to ARM_MCI_SendCommand : Send Command to card and get the response.
| int32_t(* SetupTransfer)(uint8_t *data, uint32_t block_count, uint32_t block_size, uint32_t mode) |
Pointer to ARM_MCI_SetupTransfer : Setup data transfer operation.
| int32_t(* AbortTransfer)(void) |
Pointer to ARM_MCI_AbortTransfer : Abort current data transfer.
| int32_t(* Control)(uint32_t control, uint32_t arg) |
Pointer to ARM_MCI_Control : Control MCI Interface.
| ARM_MCI_STATUS(* GetStatus)(void) |
Pointer to ARM_MCI_GetStatus : Get MCI status.
| struct ARM_MCI_CAPABILITIES |
MCI Driver Capabilities.
A MCI driver can be implemented with different capabilities. The data fields of this struct encode the capabilities implemented by this driver.
Returned by:
| struct ARM_MCI_STATUS |
| ARM_MCI_SignalEvent_t |
Pointer to ARM_MCI_SignalEvent : Signal MCI Card Event.
Provides the typedef for the callback function ARM_MCI_SignalEvent.
Parameter for:
| ARM_DRIVER_VERSION ARM_MCI_GetVersion | ( | void | ) |
Get driver version.
The function ARM_MCI_GetVersion returns version information of the driver implementation in ARM_DRIVER_VERSION
Example:
| ARM_MCI_CAPABILITIES ARM_MCI_GetCapabilities | ( | void | ) |
Get driver capabilities.
The function ARM_MCI_GetCapabilities returns information about capabilities in this driver implementation. The data fields of the structure ARM_MCI_CAPABILITIES encode various capabilities, for example supported bus modes ...
Example:
| int32_t ARM_MCI_Initialize | ( | ARM_MCI_SignalEvent_t | cb_event | ) |
Initialize the Memory Card Interface.
| [in] | cb_event | Pointer to ARM_MCI_SignalEvent |
The function ARM_MCI_Initialize initializes the MCI interface. It is called when the middleware component starts operation.
The function performs the following operations:
The parameter cb_event is a pointer to the ARM_MCI_SignalEvent callback function; use a NULL pointer when no callback signals are required.
Example:
| int32_t ARM_MCI_Uninitialize | ( | void | ) |
De-initialize Memory Card Interface.
The function ARM_MCI_Uninitialize de-initializes the resources of I2C interface.
It is called when the middleware component stops operation and releases the software resources used by the interface.
| int32_t ARM_MCI_PowerControl | ( | ARM_POWER_STATE | state | ) |
Control Memory Card Interface Power.
| [in] | state | Power state ARM_POWER_STATE |
The function ARM_MCI_PowerControl operates the power modes of the MCI interface.
The parameter state can have the following values:
Refer to Function Call Sequence for more information.
| int32_t ARM_MCI_CardPower | ( | uint32_t | voltage | ) |
Set Memory Card Power supply voltage.
| [in] | voltage | Memory Card Power supply voltage |
The function ARM_MCI_CardPower operates the memory card power supply voltage.
The parameter voltage sets the voltage. Not every voltage might be supported by the driver implementation. The structure ARM_MCI_CAPABILITIES encodes the supported voltage. Retrieve the information with the function ARM_MCI_GetCapabilities and verify the data fields.
The following values:
| Parameter voltage | Description | supported when ARM_MCI_CAPABILITIES |
|---|---|---|
| ARM_MCI_POWER_VDD_OFF | VDD (VCC) turned off | allways supported |
| ARM_MCI_POWER_VDD_3V3 | VDD (VCC) = 3.3V | data field vdd = 1 |
| ARM_MCI_POWER_VDD_1V8 | VDD (VCC) = 1.8V | data field vdd_1v8 = 1 |
| ARM_MCI_POWER_VCCQ_OFF | eMMC VCCQ turned off | allways supported |
| ARM_MCI_POWER_VCCQ_3V3 | eMMC VCCQ = 3.3V | data field vccq = 1 |
| ARM_MCI_POWER_VCCQ_1V8 | eMMC VCCQ = 1.8V | data field vccq_1v8 = 1 |
| ARM_MCI_POWER_VCCQ_1V2 | eMMC VCCQ = 1.2V | data field vccq_1v2 = 1 |
| int32_t ARM_MCI_ReadCD | ( | void | ) |
Read Card Detect (CD) state.
The function ARM_MCI_ReadCD reads the status of the Card Detect (CD) pin.
| int32_t ARM_MCI_ReadWP | ( | void | ) |
Read Write Protect (WP) state.
The function ARM_MCI_ReadWP reads the status of the Write Protect (WP) pin.
| int32_t ARM_MCI_SendCommand | ( | uint32_t | cmd, |
| uint32_t | arg, | ||
| uint32_t | flags, | ||
| uint32_t * | response | ||
| ) |
Send Command to card and get the response.
| [in] | cmd | Memory Card command |
| [in] | arg | Command argument |
| [in] | flags | Command flags |
| [out] | response | Pointer to buffer for response |
The function ARM_MCI_SendCommand
The parameter cmd is the command sent to the card.
The parameter arg contains arguments for the command cmd.
The parameter flags controls the behavior of the operation and takes predefined values listed in the table below.
The parameter response is a pointer to receive data.
The parameter flags can have the following values:
| Parameter flags | Description |
|---|---|
| ARM_MCI_RESPONSE_NONE | No response expected (default) |
| ARM_MCI_RESPONSE_SHORT | Short response (48-bit) expected |
| ARM_MCI_RESPONSE_SHORT_BUSY | Short response with busy signal (48-bit) expected |
| ARM_MCI_RESPONSE_LONG | Long response (136-bit) expected |
| ARM_MCI_RESPONSE_INDEX | Check command index in response |
| ARM_MCI_RESPONSE_CRC | Check CRC in response |
| ARM_MCI_WAIT_BUSY | Wait until busy before sending the command |
| ARM_MCI_TRANSFER_DATA | Activate Data transfer |
| ARM_MCI_CARD_INITIALIZE | Execute Memory Card initialization sequence |
| ARM_MCI_INTERRUPT_COMMAND | Send Interrupt command (CMD40 - MMC only) |
| ARM_MCI_INTERRUPT_RESPONSE | Send Interrupt response (CMD40 - MMC only) |
| ARM_MCI_BOOT_OPERATION | Execute Boot operation (MMC only) |
| ARM_MCI_BOOT_ALTERNATIVE | Execute Alternative Boot operation (MMC only) |
| ARM_MCI_BOOT_ACK | Expect Boot Acknowledge (MMC only) |
| ARM_MCI_CCSD | Send Command Completion Signal Disable (CCSD) for CE-ATA device |
| ARM_MCI_CCS | Expect Command Completion Signal (CCS) for CE-ATA device |
Calling the function ARM_MCI_SendCommand only starts the operation. The function is non-blocking and returns as soon as the driver has started the operation. It is not allowed to call this function again until the operation is in progress.
After the command is sent the response is retrieved if specified with ARM_MCI_RESPONSE_xxx flags. When the command completes successfully (requested response is received without errors) the ARM_MCI_EVENT_COMMAND_COMPLETE event is generated. In case that response is requested but not received the ARM_MCI_EVENT_COMMAND_TIMEOUT event is generated instead. In case of invalid response (or CRC error) the ARM_MCI_EVENT_COMMAND_ERROR event is generated instead. Progress of command operation can be monitored by calling the ARM_MCI_GetStatus and checking the command_active flag.
After the command operation the data transfer operation is started if specified with ARM_MCI_TRANSFER_DATA flag. The data transfer needs to be configured before that by calling the ARM_MCI_SetupTransfer. When the data transfer completes successfully the ARM_MCI_EVENT_TRANSFER_COMPLETE event is generated. In case that data transfer is not completed in-time (specified by ARM_MCI_DATA_TIMEOUT) the ARM_MCI_EVENT_TRANSFER_TIMEOUT event is generated instead. In case of CRC errors the ARM_MCI_EVENT_TRANSFER_ERROR event is generated instead. Progress of data transfer operation can be monitored by calling the ARM_MCI_GetStatus and checking the transfer_active flag.
See also:
| int32_t ARM_MCI_SetupTransfer | ( | uint8_t * | data, |
| uint32_t | block_count, | ||
| uint32_t | block_size, | ||
| uint32_t | mode | ||
| ) |
Setup read or write transfer operation.
| [in,out] | data | Pointer to data block(s) to be written or read |
| [in] | block_count | Number of blocks |
| [in] | block_size | Size of a block in bytes |
| [in] | mode | Transfer mode |
The function ARM_MCI_SetupTransfer prepares the data transfer operation that is initiated by calling the function ARM_MCI_SendCommand with the parameter flags = ARM_MCI_TRANSFER_DATA.
The parameter data is a pointer to the data to transfer.
The parameter block_count is the number of blocks to transfer.
The parameter block_size is the size of a block.
The parameter mode sets the transfer mode and can have the values liste in the table below:
| Transfer Directions | Description |
|---|---|
| ARM_MCI_TRANSFER_READ | Read data from MCI |
| ARM_MCI_TRANSFER_WRITE | Write data to MCI |
| ARM_MCI_TRANSFER_BLOCK (default) | Block Data transfer |
| ARM_MCI_TRANSFER_STREAM | Stream Data transfer (MMC only) |
| int32_t ARM_MCI_AbortTransfer | ( | void | ) |
Abort current read/write data transfer.
The function ARM_MCI_AbortTransfer aborts the active data transfer operation initiated with ARM_MCI_SendCommand.
| int32_t ARM_MCI_Control | ( | uint32_t | control, |
| uint32_t | arg | ||
| ) |
Control MCI Interface.
| [in] | control | Operation |
| [in] | arg | Argument of operation (optional) |
Th function ARM_MCI_Control controls the MCI interface and executes various operations.
The parameter control specifies the operation. Values for control cannot be ORed, but must be called separately in the code.
The parameter arg provides, depending on the operation, additional information or sets values.
The table lists values for the parameter control.
| Parameter control | Operation |
|---|---|
| ARM_MCI_BUS_SPEED | Set the Bus Speed. The parameter arg specifies the speed in bits/s; The function returns the bus speed configured in bits/s. |
| ARM_MCI_BUS_SPEED_MODE | Set the Bus Speed Mode. Predefined values for arg are listed in the table Bus Speed Mode. |
| ARM_MCI_BUS_CMD_MODE | Set the CMD Line Mode. Predefined values for arg are listed in the table Bus CMD Line Mode. |
| ARM_MCI_BUS_DATA_WIDTH | Set data bus width. Predefined values for arg are encoded in Bus Data Width. |
| ARM_MCI_DRIVER_STRENGTH | Set driver strength. Predefined values for arg are listed in the table Driver Type |
| ARM_MCI_CONTROL_RESET | Control optional RST_n Pin (eMMC). The parameter arg can have the values [0:inactive(default); 1:active] |
| ARM_MCI_CONTROL_CLOCK_IDLE | Control clock generation on CLK Pin when idle. The parameter arg can have the values [0:disabled; 1:enabled] |
| ARM_MCI_UHS_TUNING_OPERATION | Sampling clock Tuning operation (SD UHS-I). The parameter arg can have the values [0:reset; 1:execute] |
| ARM_MCI_UHS_TUNING_RESULT | Sampling clock Tuning result (SD UHS-I). Returns [0:done; 1:in progress; -1:error] |
| ARM_MCI_DATA_TIMEOUT | Set Data timeout; The parameter arg sets the timeout in bus cycles. |
| ARM_MCI_CSS_TIMEOUT | Set Command Completion Signal (CCS) timeout. The parameter arg sets timeout in bus cycles. |
| ARM_MCI_MONITOR_SDIO_INTERRUPT | Monitor SD I/O interrupt. The parameter arg can have the values [0:disabled(default); 1:enabled]. Monitoring is automatically disabled when an interrupt is recognized. |
| ARM_MCI_CONTROL_READ_WAIT | Control Read/Wait states for SD I/O. The parameter arg can have the values [0:disabled(default); 1:enabled]. |
| ARM_MCI_SUSPEND_TRANSFER | Suspend Data transfer (SD I/O). Returns the number of remaining bytes to transfer. |
| ARM_MCI_RESUME_TRANSFER | Resume Data transfer (SD I/O). |
Bus Speed Mode
The function ARM_MCI_GetCapabilities lists the supported bus speed modes. Initially, all SD cards use a 3.3 volt electrical interface. Some SD cards can switch to 1.8 volt operation. For example, the use of ultra-high-speed (UHS) SD cards requires 1.8 volt operation and a 4-bit bus data width. The bit field ARM_MCI_CAPABILITIES.uhs_signaling encodes whether the driver supports 1.8 volt UHS signaling.
The control operation ARM_MCI_BUS_SPEED_MODE sets the bus speed mode using the parameter arg.
| Parameter arg | Bus Speed Mode |
|---|---|
| ARM_MCI_BUS_DEFAULT_SPEED (default) | Set the bus speed for SD/MMC cards: Default Speed mode up to [25;26]MHz |
| ARM_MCI_BUS_HIGH_SPEED | Set the bus speed for SD/MMC: High Speed mode up to [50;52]MHz |
| ARM_MCI_BUS_UHS_SDR12 | Set the bus speed for SD: SDR12 (Single Data Rate) up to 25MHz, 12.5MB/s: UHS-I (Ultra High Speed) 1.8V signalling |
| ARM_MCI_BUS_UHS_SDR25 | Set the bus speed for SD: SDR25 (Single Data Rate) up to 50MHz, 25 MB/s: UHS-I (Ultra High Speed) 1.8V signalling |
| ARM_MCI_BUS_UHS_SDR50 | Set the bus speed for SD: SDR50 (Single Data Rate) up to 100MHz, 50 MB/s: UHS-I (Ultra High Speed) 1.8V signalling |
| ARM_MCI_BUS_UHS_SDR104 | Set the bus speed for SD: SDR104 (Single Data Rate) up to 208MHz, 104 MB/s: UHS-I (Ultra High Speed) 1.8V signalling |
| ARM_MCI_BUS_UHS_DDR50 | Set the bus speed for SD: DDR50 (Dual Data Rate) up to 50MHz, 50 MB/s: UHS-I (Ultra High Speed) 1.8V signalling |
Bus CMD Line Mode
The control operation ARM_MCI_BUS_CMD_MODE sets the bus command line mode using the parameter arg.
| Parameter arg | Bus CMD Line Mode |
|---|---|
| ARM_MCI_BUS_CMD_PUSH_PULL (default) | Set the Push-Pull CMD line |
| ARM_MCI_BUS_CMD_OPEN_DRAIN | Set the Open Drain CMD line (MMC only) |
Bus Data Width
Specifies the bus data width (the number of data I/O pins on the SD/MMC interface).
For high speed memory cards, a 4-bit bus data width should be used (or 8-bit for eMMC). The bit fields ARM_MCI_CAPABILITIES.data_width_4 and ARM_MCI_CAPABILITIES.data_width_8 encode whether the driver supports a specific bus data with.
The control operation ARM_MCI_BUS_DATA_WIDTH sets the bus data width using the parameter arg.
| Parameter arg | Bus Data Width |
|---|---|
| ARM_MCI_BUS_DATA_WIDTH_1 (default) | Set the Bus data width to 1 bit |
| ARM_MCI_BUS_DATA_WIDTH_4 | Set the Bus data width to 4 bits |
| ARM_MCI_BUS_DATA_WIDTH_8 | Set the Bus data width to 8 bits |
| ARM_MCI_BUS_DATA_WIDTH_4_DDR | Set the Bus data width to 4 bits, DDR (Dual Data Rate) - MMC only |
| ARM_MCI_BUS_DATA_WIDTH_8_DDR | Set the Bus data width to 8 bits, DDR (Dual Data Rate) - MMC only |
Driver Type
Specifies the interface driver type.
The control operation ARM_MCI_DRIVER_STRENGTH sets the interface driver type using the parameter arg.
| Parameter arg | Driver Type |
|---|---|
| ARM_MCI_DRIVER_TYPE_A | Set the interface to SD UHS-I Driver Type A |
| ARM_MCI_DRIVER_TYPE_B (default) | Set the interface to SD UHS-I Driver Type B |
| ARM_MCI_DRIVER_TYPE_C | Set the interface to SD UHS-I Driver Type C |
| ARM_MCI_DRIVER_TYPE_D | Set the interface to SD UHS-I Driver Type D |
Examples:
| ARM_MCI_STATUS ARM_MCI_GetStatus | ( | void | ) |
Get MCI status.
The function ARM_MCI_GetStatus returns the current MCI interface status.
| void ARM_MCI_SignalEvent | ( | uint32_t | event | ) |
Callback function that signals a MCI Card Event.
| [in] | event | MCI Events |
The function ARM_MCI_SignalEvent is a callback function registered by the function ARM_MCI_Initialize.
The parameter event indicates one or more events that occurred during driver operation. Each event is encoded in a separate bit and therefore it is possible to signal multiple events within the same call.
Not every event is necessarily generated by the driver. This depends on the implemented capabilities stored in the data fields of the structure ARM_NAND_CAPABILITIES, which can be retrieved with the function ARM_NAND_GetCapabilities.
The following events can be generated:
| Parameter event | Bit | Description | supported when ARM_NAND_CAPABILITIES |
|---|---|---|---|
| ARM_MCI_EVENT_CARD_INSERTED | 0 | Occurs after Memory Card inserted | always supported |
| ARM_MCI_EVENT_CARD_REMOVED | 1 | Occurs after Memory Card removal | always supported |
| ARM_MCI_EVENT_COMMAND_COMPLETE | 2 | Occurs after command completed successfully | always supported |
| ARM_MCI_EVENT_COMMAND_TIMEOUT | 3 | Occurs after command timeout | always supported |
| ARM_MCI_EVENT_COMMAND_ERROR | 4 | Occurs after command response error (CRC error or invalid response) | always supported |
| ARM_MCI_EVENT_TRANSFER_COMPLETE | 5 | Occurs after data transfer completed successfully | always supported |
| ARM_MCI_EVENT_TRANSFER_TIMEOUT | 6 | Occurs after data transfer timeout | always supported |
| ARM_MCI_EVENT_TRANSFER_ERROR | 7 | Occurs after data transfer error (CRC failed) | always supported |
| ARM_MCI_EVENT_SDIO_INTERRUPT | 8 | Indicates SD I/O Interrupt | data field sdio_interrupt = 1 |
| ARM_MCI_EVENT_CCS | 9 | Indicates a Command Completion Signal (CCS) | data field ccs = 1 |
| ARM_MCI_EVENT_CCS_TIMEOUT | 10 | Indicates a Command Completion Signal (CCS) Timeout | data field css_timeout = 1 |
See also:

