|
CMSIS-RTOS2
Version 2.1.0
Real-Time Operating System: API and RTX Reference Implementation
|
|
CMSIS-RTOS2
Version 2.1.0
Real-Time Operating System: API and RTX Reference Implementation
|
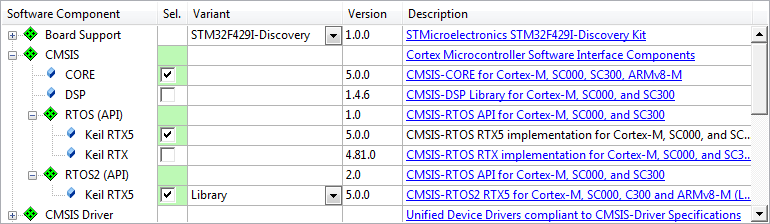
RTX5 supplies both API layers: CMSIS-RTOS v1 and CMSIS-RTOS v2. This allows a gradient transition from version 1 to 2. A modified v1 header and a special v1 compatibility module enable existing code to run on a v2 implementation with almost no modifications.
Only a few incompatibilities and limitations exist:
osKernelRunning has been deprecated. "main" was usually a running thread in v1 implementations, which is not the case in v2 anymore. It was also possible to not even initialize and start the Kernel, but just to assume that "main" was a running thread. Portable code would typically initialize the Kernel (osKernelInitialize) and then start the Kernel (osKernelStart) or skip that part if osKernelRunning indicated that it is already running.osWait is deprecated.osErrorParameter and osErrorValue. The new version only uses a common osErrorParameter code. Therefore, code relying on osErrorValue is not compatible. The following functions are affected:osPoolFree) returns osErrorParameter instead of osErrorValue when block to be returned is invalidThe level of migration depends on the project's phase in its life cycle:
Upgrade to RTX Version 5 from any 4.x version using the API v1 compatibility layer. Configure an existing project as follows:
int main (void) to void app_main (void *arg).int main (void) which implements at least:Example - Application Main Thread
To validate the correct operation of your RTOS after migration you can temporarily integrate the RTOS Validation component into your project.
Implementing new features in your project is ideally done using the new API. Both API versions are offered in RTX5 and can exist along-side.
The component selection is identical to Migration Level 1.
Include "cmsis_os2.h" in all modules where access to API v2 functions is required.
The following snippet shows how threads - created with both API versions - live along-side:
The full example "RTX5 Migration" is part of the CMSIS5 pack and available from the pack installer.
Migrating fully to APIv2 reduces the overhead of the translation layer and simplifies the project. There is some effort to replace and re-test all API Version 1 calls. The following steps are recommended as a rough guide-line:
Generally there are no longer os*Def macros to declare OS objects.

